La famiglia DAxxx è una famiglia di servosistemi brushless compatti che offrono ottime prestazioni e completezza di funzioni ad un prezzo competitivo. Disponibili nelle versioni standard con comando da ingresso analogico, treno di impulsi (Emulazione motore stepping), posizionatore indexer integrato o CANopen e EtherCAT (opzionali). Tutti i sistemi dispongono di protocolo Modbus RTU.
Gli azionamenti della serie DAxxx dispongono di modalità di controllo combinate in velocità/coppia/posizione offrendo, in un unico drive, sia i tradizionali controlli discreti con segnali digitali e analogici uniti ad un sistema di posizionamento integrato.
I sistemi DAxxx consentono ottime prestazioni dinamiche grazie alla banda passante di 2KHz e permettono la gestione di posizionamenti estremamente precisi utilizzando i motori con encoder seriale 23 bit.

Impostazione parametri
Anche se l’azionamento dispone di un display 7 segmenti a 6 cifre ed una tastierina a 4 tasti con la quale è possibile effettuare tutte le impostazioni necessarie (Per il cui utilizzo si rimanda al manuale utente) per la configurazione si consiglia il programma Servoplorer (INVT Servo Monitor Software).
Impostazione parametri da tastiera
Le informazioni per l’impostazione dei parametri sono riportate nel capitolo 5.2.4 Parameter setting mode del manule utente. Di seguito un estratto:
- Con il tasto MODE si esegue scroll di tutte le impostazioni fino ad arrivare ai parametri: P0.00.
- Con i tasti UP/DW si esegue lo scroll di tutti i parametri.
- Con il tasto SET (Premuto per 2.5 secondi) si passa alla visualizzazione del valore parametro: Lxxxxx.
- Con il tasto SET (Veloce=SHIFT) si esegue lo scroll tra tutte le cifre del valore (Che lampeggiano). I tasti UP/DW impostano il valore.
- Continuando con SET (Veloce=SHIFT) si passa al valore alto Hxxxxxx, continuando lo scroll e l’impostazione.
- Con il tasto SET (Premuto per 2.5 secondi) si salva il valore SAVED
Parametri azionamento
I parametri azionamento sono identificabili con un prefisso un numero ed un sottonumero. Il prefisso indica il tipo di parametro:
- R: Variabili di sola lettura
- P: Parametri configurazione
- PtP: Parametri controllo interno punto punto
Parametri utili
- P4.92 (Modbus 1984-1985 16bit): Set factory default, impostando 1 l’azionamento viene impostato con i parametri di default.
Comando da Modbus
Tutti gli azionamenti dispongono di interfaccia Modbus RTU su RS485, ecco i parametri di configurazione:
- Impostare indirizzo Modbus (Default nodo 1), P4.01=xxx.
- Impostare baud rate comunicazione (Default 19200), P4.03=x.
- Impostare parità comunicazione (Default E, 8, 1), P4.04=x.
Utilizzare Toolly per accesso Modbus
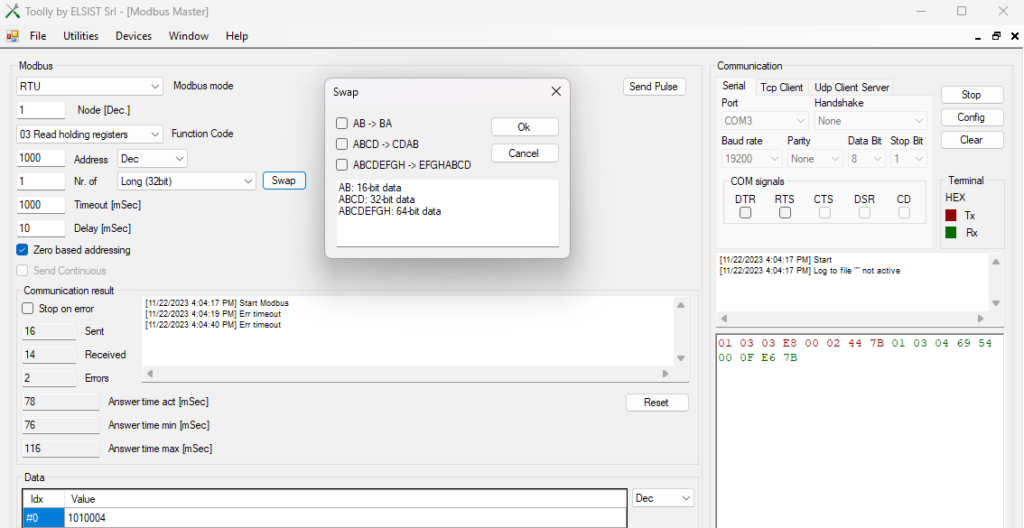
Per accedere ai parametri dell’azionamento via Modbus è possibile utilizzare la funzione Modbus master di Toolly. Come visibile nello screenshot a lato occorre attivare lo Zero based addressing e non eseguire lo swap dei valori.
Nell’esempio viene letto il tipo di motore impostato P0.00 a 32 bits (Indirizzo Modbus 1000-1001).
Configurazioni comuni
Configurando i vari parametri dell’azionamento è possibile ottenere moltissime configurazioni di utilizzo, di seguito le configurazioni più utilizzate.
Comando da impulsi (Emulazione stepping motor)
L’azionamento viene configurato per comportarsi come uno stepping motor, l’ingresso digitale PULS gestisce il clock, l’ingresso digitale SIGN gestisce la direzione di rotazione.
- P0.03 (Modbus 1006-1007 16bit) Control mode, definisce la modalità operativa. 0:Position mode
- P0.20 (Modbus 1040-1041 16bit) Position command source, definisce chi gestisce il comando di posizionamento. 0:Pulse input
- P0.22 (Modbus 1044-1045 32bit) Pulses per motor resolution, definisce il numero di impulsi di clock per ogni giro motore.
- P0.23 (Modbus 1046-1047 16bit) Pulse input mode, definisce la modalità di gestione impulsi. 0:Pulse+Direction
Rotazione in velocità con comando da Modbus
L’azionamento viene configurato per gestire la rotazione del motore con un ingresso di velocità da Modbus.
- P0.03 (Modbus 1006-1007 16bit) Control mode, modalità operativa. 1:Speed mode
- P0.40 (Modbus 1080-1081 16bit) Speed command source, sorgente comando di velocità. 2:BUS input
- P4.13 (Modbus 1824-1825 32bit) BUS speed command, velocità rotazione motore (giri/min), valore diviso per 10 (Range -6000.0~6000.0).
- R0.13 (Modbus 4030-4031 32bit) Encoder feedback, ritorna il valore dell’encoder motore.
Posizionamento con comando da Modbus
L’azionamento viene configurato per gestire il posizionamento da Modbus.
- P0.03 (Modbus 1006-1007 16bit) Control mode, modalità operativa. 0:Position mode
- P0.20 (Modbus 1040-1041 16bit) Position command selection, modalità operativa. 2:PTP mode
- P5.21 (Modbus 2042-2043 16bit) Target speed 00, velocità rotazione motore (giri/min)(Range -6000.0~6000.0).
- PtP0.01 (Modbus 3202-3203 32bit) Command of position 00, posizione da raggiungere (impulsi)(Range -2147483647~2147483647).
- P0.04 (Modbus 1008-1009 16bit) Internal enabling command, comando abilitazione driver. 0:Disabilita, 1:Abilita
- P5.20 (Modbus 2040-2041 16bit) PTP trigger signal, comanda posizionamento. 0:Comanda posizionamento su posizione 00, -1:Toglie comando