Questo blocco funzione esegue la gestione del protocollo CANOpen, questo è un blocco funzione protetto per utilizzarlo occorre richiedere il codice di protezione, vedi protezione funzioni e blocchi funzione. E’ comunque possibile utilizzarlo liberamente in modo test per 15 Min.
Il CAN è un bus di campo progettato come rete di comunicazione ed il protocollo CANopen è diventato uno standard nel settore industriale specialmente quando servono requisiti real-time. Questo FB rappresenta il cuore della comunicazione CANopen eseguendo tutte le funzioni richieste da un sistema master.
Per gestire la comunicazione occorre istanziarlo nel proprio programma ed il suo indirizzo di allocazione passato ai FB CANOpenMNode di gestione dei moduli, i parametri sono gestiti direttamente dai vari FBs collegati.
Il parametro PHBeatTime permette di definire il tempo di invio del messaggio di heartbeat a tutti i nodi del bus. Ogni nodo ne controlla la ricezione ed in caso di mancata ricezione và in errore (Vedi configurazione registro 16#1029).
Approfondimenti
In questo topic informazioni su errore ricezione messaggi CAN.
Upgrade list
- Se l’oggetto aggiornato non è nell’ultima versione del package, vedi capitolo “Aggiornamento librerie” in questo articolo.
- Gli oggetti obsoleti sono inseriti nella libreria eLLabObsoleteLib fare riferimento al relativo manuale ed al manuale programmazione in formato pdf.
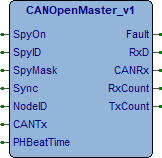
CANOpenMaster
Gestiva internamente l’impostazione del controller CAN, ora è eseguita da programma utente, eliminati ingressi Enable, BRate e Mode. Eliminata definizione CANOMMODE il nuovo modulo (Object oriented) ha una serie di metodi per gestire i modi operativi.
Descrizione
SpyOn (BOOL) Se attivo permette di spiare i messaggi CAN in transito sul bus in base al filtro definito, vedi esempi di filtro.
SpyID (WORD) Definizione ID messaggi da spiare (Vedi filtro spionaggio).
SpyMask (WORD) Definizione maschera messaggi da spiare (Vedi filtro spionaggio).
Sync (BOOL) Sul fronte di attivazione viene inviato il messaggio di SYNC sulla rete CANOpen.
NodeID (BYTE) ID nodo master (Default 127).
CANTx (SYSCANMESSAGE) Messaggio CAN da trasmettere (Gestito dai FBs collegati).
PHBeatTime (UINT) Definizione tempo invio heartbeat (mS) (Vedi Meccanismo Heartbeat in CANOpenMNode).
Fault (BOOL) Settato per un loop in caso di errore nella gestione.
RxD (BOOL) Settato per un loop su ricezione messaggio CAN (Gestito dai FBs collegati).
CANRx (SYSCANMESSAGE) Messaggio CAN ricevuto (Gestito dai FBs collegati).
RxCount (UDINT) Counter messaggi ricevuti.
TxCount (UDINT) Counter messaggi trasmessi.
Esempi di filtro
Viene eseguito lo spionaggio di tutti i messaggi che soddisfano il controllo COB-ID AND SpyMask = SpyID, di seguito alcune configurazioni:
- Spionaggio di tutti i messaggi relativi al nodo 16#08: SpyMask:=16#007F, SpyID:=16#0008.
- Spionaggio messaggi Sync e Emergency: SpyMask:=16#0080, SpyID:=16#0080.
- Spionaggio messaggi Emergency da nodo 16#10: SpyMask:=16#00FF, SpyID:=16#0090.
- Spionaggio messaggi NMT da nodo 16#01: SpyMask:=16#0FFF, SpyID:=16#0701.
Metodi disponibili
MTx
Questo metodo esegue trasmissione del messaggio CANTx.
Il metodo ritorna (BOOL), TRUE comando eseguito.

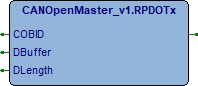
RPDOTx
Questo metodo esegue la trasmissione di un RPDO (Process Data Object) verso un nodo CAN slave.
COBID (WORD) Communication Object ID.
DBuffer (PVOID) Indirizzo buffer dati da inviare.
DLength (UDINT) Lunghezza dati da inviare (Da 1 a 8).
Il metodo ritorna (BOOL), TRUE comando eseguito.
TPDORx
Questo metodo esegue la ricezione di un TPDO (Process Data Object) trasmesso da un nodo CAN slave.
COBID (WORD) Communication Object ID.
DBuffer (PVOID) Indirizzo buffer trasferimento dati ricevuti.
Il metodo ritorna (USINT) con la lunghezza del PDO ricevuto (Da 1 a 8). 0 se nessuna ricezione.

Spionaggio funzionamento
Se SpyOn attivo è possibile utilizzare la console di spionaggio per verificare il funzionamento della FB. Sono previsti vari livelli di triggers.
Trigger di spionaggio
| Trigger | Descrizione |
|---|---|
| 16#00000001 | Rx: Messaggi CAN ricevuti. |
| 16#00000002 | Tx: Messaggi CAN trasmessi. |
| 16#10000000 | Lg: Messaggi di log |
| 16#40000000 | Er: Errori funzionamento |
Filtro spionaggio
Il numero di messaggi in transito sul bus CAN è elevato ed è impossibile spiarli in modo completo, quindi è stato inserito un filtro basato su SpyMask e SpyID che permette di definire quali messaggi si vogliono spiare. In pratica il valore di COB-ID viene messo in AND con SpyMask e se uguale a SpyID il messaggio è inviato in console spionaggio. Ecco alcuni esempi di impostazione filtro.
| SpyMak | SpyID | Descrizione |
|---|---|---|
| 16#00FF | 16#0001 | Spionaggio di tutti i messaggi relativi al nodo 1 |
| 16#00FF | 16#007F | Spionaggio di tutti i messaggi relativi al nodo 127 |
| 16#0FFF | 16#0201 | Spionaggio messaggi trasmessi a RPDO1 nodo 1
CANOpenMaster:Tx|[COB-ID:200-01] [C0 -- -- -- -- -- -- --] -> RPDO1 [01] |
Di seguito alcuni esempi di messaggi CAN trasmessi al nodo slave e ricevuti dal nodo slave cosi come visualizzati nella console di spionaggio.
Inizializzazione nodo 1.
16:35:46.970610|CANOpenMNode:Lg|-------------------------------------------------------------[Reset node [01]]-- 16:35:46.970810|CANOpenMaster:Tx|[COB-ID:000-00] [81 01 -- -- -- -- -- --] -> NMT [01] Go to reset node 16:35:47.971018|CANOpenMaster:Tx|[COB-ID:000-00] [82 01 -- -- -- -- -- --] -> NMT [01] Go to reset communication .... PDO mapping 16:35:51.837634|CANOpenMaster:Tx|[COB-ID:000-00] [01 01 -- -- -- -- -- --] -> NMT [01] Go to operational 16:35:51.837675|CANOpenMNode:Lg|-------------------------------------------------------[Node operational [01]]--
Messaggio SDO su nodo 1, Index 1400 Sub-Index 1, lettura DWORD, e ricezione risposta con valore letto 16#201.
16:35:51.010649|CANOpenMaster:Tx|[COB-ID:600-01] [40 00 14 01 00 00 00 00] -> SDO [01] 1400 Sub:1 Read 16:35:51.012426|CANOpenMaster:Rx|[COB-ID:580-01] [43 00 14 01 01 02 00 00] <- SDO [01] 1400 Sub:1 Read [4] 00000201
Messaggio SDO su nodo 1, Index 100C Sub-Index 0, scrittura DWORD con valore 16#80000201, e ricezione risposta Ok.
16:35:51.111964|CANOpenMaster:Tx|[COB-ID:600-01] [23 00 14 01 01 02 00 80] -> SDO [01] 1400 Sub:1 Write [4] 80000201 16:35:51.114571|CANOpenMaster:Rx|[COB-ID:580-01] [60 00 14 01 01 02 00 00] <- SDO [01] 1400 Sub:1 Write Ok (Not zeroed)
Communication Objects
Sul bus CANopen si possono trasmettere solo pacchetti brevi costituiti da un ID a 11 bit e da 0 a 8 byte di dati. Lo standard CANopen divide l’ID frame CAN a 11 bit in un codice funzione a 4 bit e un ID nodo CANopen a 7 bit. Ciò limita il numero di dispositivi in una rete CANopen a 127 (0 essendo riservato per la trasmissione).
Tabella communication objects
+---------------+-------------------------+--------------+ | COB-ID(s) | Communication object | Direction | +---------------+-------------------------+--------------+ | 16#000 | NMT node control | Master->Node | | 16#001 | Global failsafe command | | | 16#080 | Sync | Master->Node | | 16#080+NodeID | Emergency | Node->Master | | 16#100 | Timestamp | Master->Node | | 16#180+NodeID | TPDO1 | Node->Master | | 16#200+NodeID | RPDO1 | Master->Node | | 16#280+NodeID | TPDO2 | Node->Master | | 16#300+NodeID | RPDO2 | Master->Node | | 16#380+NodeID | TPDO3 | Node->Master | | 16#400+NodeID | RPDO3 | Master->Node | | 16#480+NodeID | TPDO4 | Node->Master | | 16#500+NodeID | RPDO4 | Master->Node | | 16#580+NodeID | SDO | Node->Master | | 16#600+NodeID | SDO | Master->Node | | 16#700+NodeID | NMT node monitoring | Node|>Master | +---------------+-------------------------+--------------+
Messaggi SDO
I messaggi SDO (Service Data Objects) forniscono l’accesso ai dizionari degli oggetti in ogni dispositivo. Sono utilizzati per la configurazione dei dispositivi. Ma è anche possibile ottenere valori di dati “di processo” interrogando tramite SDO la voce del dizionario degli oggetti appropriata. Il protocollo SDO conferma sempre l’operazione di lettura/scrittura, in caso di errore ritorna un codice di ABORT.
Formato messaggi SDO
Invio Request SDO da master.
+----------+-[1 Byte]-+-[2 Bytes]-+-[1 Byte]-+-[4 Bytes]-+
| 0x600+ID | Request | Index | Sub Index| Data |
+----------+----------+-----+-----+----------+--+--+--+--+
Request codes:
16#40: Accesso in read.
16#2F: Scrittura di 1 byte
16#2B: Scrittura di 2 bytes
16#23: Scrittura di 4 bytes
Response SDO da nodo.
Il messaggio di risposta è sempre lungo 8 bytes.
+----------+-[1 Byte]-+-[2 Bytes]-+-[1 Byte]-+-[4 Bytes]-+
| 0x580+ID | Response | Index | Sub Index| Data |
+----------+----------+-----+-----+----------+--+--+--+--+
Response codes:
16#60: Ok scrittura, i 4 bytes dati "0".
16#4F: Lettura di 1 byte, primo byte contiene valore, altri "0"
16#4B: Lettura di 2 bytes, primi 2 bytes contengono valore, altri "0"
16#43: Lettura di 4 bytes
Codici di ABORT
Se un messaggio di SDO inviato al nodo contiene un indice o un valore non corretto o non accettato il modulo slave risponde con un messaggio di abort, la gestione del nodo si arresta è andando a spiare i pacchetti scambiati con il nodo è possibile risalire alla causa del problema. Ecco lo spionaggio dell’invio al nodo 1 di un messaggio SDO e ricezione messaggio di risposta ABORT con codice 06070010 (Tabella codici di abort).
17:12:02.149407|CANOpenMaster:Tx|[COB-ID:600-01] [40 99 09 00 00 00 00 00] -> SDO [01] 0999 Sub:0 Read 17:12:02.150889|CANOpenMaster:Rx|[COB-ID:580-01] [80 99 09 00 00 00 02 06] <- SDO [01] 0999 Sub:0 <<< Abort >>> 06020000
Esempi
ST_CANOpenSniffer
Utilizzando questo programma su un impianto connesso ad un bus CANOpen è possibile visualizzare sulla console di spionaggio tutti i messaggi in transito sul bus.
LogicLab (Ptp184, ST_CANOpenSniffer)
PROGRAM ST_CANOpenSniffer
VAR
COMaster : CANOpenMaster_v1; (* CANOpen master *)
END_VAR
// *****************************************************************************
// PROGRAM "ST_CANOpenSniffer"
// *****************************************************************************
// By using this program on a system connected to a CANOpen bus it's possible
// to display on the spy console all messages on transit on the bus
// -----------------------------------------------------------------------------
// -------------------------------------------------------------------------
// INITIALIZATION
// -------------------------------------------------------------------------
// Define settings for the used FBs.
IF (SysFirstLoop) THEN
COMaster.SpyOn:=TRUE; //SpyOn
COMaster.SpyID:=16#0000; //Spy ID
COMaster.SpyMask:=16#0000; //Spy mask
// i:=SysCANSetMode(CAN_250KBIT, 16#00000000, 16#00000000); //Accept all 11 and 29 bits messages
eTO_JUNK(SysCANSetMode(CAN_250KBIT, 16#000007FF, 16#00000000)); //Accept only 11 bits messages
END_IF;
// -------------------------------------------------------------------------
// SNIFF THE CANOPEN BUS
// -------------------------------------------------------------------------
// Sniff all messages related two nodes on the CANOpen bus.
WHILE (TRUE) DO
COMaster(); //CANOpen master
IF NOT(COMaster.RxD) THEN EXIT; END_IF;
END_WHILE;
// [End of file]ST_CANOpenMaster
Sono gestiti due moduli di I/O su bus CANOpen e viene comandato il lampeggio di una uscita su ogni modulo. I FB di gestione modulo vanno creati in base alla documentazione del tipo di modulo da gestire. In questo articolo trovate degli esempi.
LogicLab (Ptp184, ST_CANOpenMaster)
PROGRAM ST_CANOpenMaster
VAR
Blink : eTON; (* Blink timer *)
CDoModule : CanDOut; (* Can digital outputs module *)
WNModule : iRCop; (* Weintek I/O module *)
COMaster : CANOpenMaster_v1; (* CANOpen master *)
END_VAR
// *****************************************************************************
// PROGRAM "ST_CANOpenMaster"
// *****************************************************************************
// Is managed a CANOpen bus with two modules attached.
// -----------------------------------------------------------------------------
// -------------------------------------------------------------------------
// INITIALIZATION
// -------------------------------------------------------------------------
// Define settings for the used FBs.
IF (SysFirstLoop) THEN
COMaster.SpyOn:=FALSE; //SpyOn
COMaster.SpyID:=16#0001; //Spy ID
COMaster.SpyMask:=16#007F; //Spy mask
COMaster.NodeID:=127; //Master node ID
COMaster.PHBeatTime:=150; //Producer Heartbeat Time (mS)
//i:=SysCANSetMode(CAN_250KBIT, 16#00000000, 16#00000000); //Accept all 11 and 29 bits messages
eTO_JUNK(SysCANSetMode(CAN_250KBIT, 16#000007FF, 16#00000000)); //Accept only 11 bits messages
// Can digital outputs module settings
CDoModule.SpyOn:=TRUE; //SpyOn
CDoModule.NodeID:=16#01; //Node ID
CDoModule.PHBeatTime:=200; //Producer Heartbeat Time (mS)
CDoModule.COMaster:=ADR(COMaster); //CANOpen master
// Weintek iRCop module settings.
WNModule.SpyOn:=FALSE; //SpyOn
WNModule.NodeID:=16#02; //Node ID
WNModule.PHBeatTime:=200; //Producer Heartbeat Time (mS)
WNModule.COMaster:=ADR(COMaster); //CANOpen master
END_IF;
// -------------------------------------------------------------------------
// MANAGE THE CANOPEN BUS
// -------------------------------------------------------------------------
// Manage CANOpen and all the attached modules.
WHILE (TRUE) DO
COMaster(); //CANOpen master
CDoModule(); //Deditec COS-REL8 module
WNModule(); //Weintek iRCop module
IF NOT(COMaster.RxD) THEN EXIT; END_IF;
END_WHILE;
// -------------------------------------------------------------------------
// GESTIONE CAN OPEN BUS
// -------------------------------------------------------------------------
// Blink outputs on both slave modules.
Blink(IN:=NOT(Blink.Q), PT:=1000);
IF NOT(Blink.Q) THEN RETURN; END_IF;
WNModule.Output:=WNModule.Output+1; //Outputs to module
CDoModule.Output:=CDoModule.Output+1; //Outputs to module
// [End of file]