La serie GD20-EU comprende inverter vettoriali fino a 110kW per usi generali. Questi dispositivi adottano algoritmi di controllo vettoriale sensorless con funzione di tuning statico o dinamico che permette di gestire al meglio anche applicazioni particolarmente gravose.
Questo blocco funzione da eseguire in task Back utilizzabile con modello a cascata, permette di eseguire la gestione dell’inverter GD20-EU tramite connessione Modbus in RS485, è possibile gestire i comandi di marcia ed il set point di frequenza. Vengono ritornate le informazioni di stato dell’inverter.
In MMdb occorre passare l’indirizzo del FB di gestione protocollo Modbus, in Node definire l’indirizzo di nodo assegnato all’inverter. Attivando Enable Se inverter connesso si attiva DReady ed in uscita si avranno i dati acquisiti. Per gestire l’inverter via Modbus dal FB occorre impostare opportunamente alcuni parametri, vedi capitolo Comando da Modbus in questo articolo.

Approfondimenti
- Vedi eventuali note di rilascio raccolta librerie.
- In questo topic informazioni sulla gestione inverter da Modbus.
Upgrade list
- Se l’oggetto aggiornato non è nell’ultima versione del package, vedi capitolo “Aggiornamento librerie” in questo articolo.
- Gli oggetti obsoleti sono inseriti nella libreria eLLabObsoleteLib fare riferimento al relativo manuale ed al manuale programmazione in formato pdf.
InvtGD20EU_v1
Utilizza il nuovo blocco funzione ModbusMaster_v2, tutti gli altri parametri rimangono inalterati.
InvtGD20EU_v2
Utilizza il nuovo blocco funzione ModbusMaster_v3, inserito uscita Fault.
InvtGD20EU_v3
Inserito parametri in ingresso:
AOutput (ARRAY[0..1] OF REAL) Impostazione valore analogico in uscita (%)
Inserito parametri in uscita:
OFrequency (REAL) Frequenza in uscita (Hz).
BUSVoltage (REAL) Tensione BUS in continua (V).
OVoltage (REAL) Tensione in uscita (V).
AInput (ARRAY[0..3] OF REAL) Valore analogico in ingresso (%).
InvtGD20EU_v4
Inserito parametro in ingresso:
EReset (BOOL) Comando reset errore inverter.
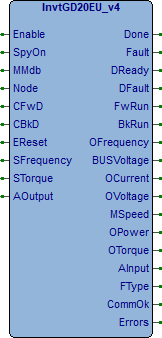
Descrizione
Enable (BOOL) Comando abilitazione gestione.
SpyOn (BOOL) Se attivo permette di spiare il funzionamento del FB (Vedi articolo).
MMdb (@ModbusMaster_v3) Indirizzo istanza FB ModbusMaster per gestione protocollo Modbus.
Node (USINT) Nodo Modbus assegnato al dispositivo. Vedere parametro P14.00 inverter.
CFwD (BOOL) Comando rotazione avanti motore. Occorre avere parametro inverter P00.01=2.
CBkD (BOOL) Comando rotazione indietro motore. Occorre avere parametro inverter P00.01=2.
EReset (BOOL) Comando reset errore inverter.
SFrequency (REAL) Impostazione frequenza di uscita (Hz). Occorre avere parametro inverter P00.06=8.
STorque (REAL) Impostazione limite di coppia su motore (%). Il valore 100% corrisponde alla coppia nominale del motore, il limite massimo è 300%. Per l’utilizzo del limite di coppia vedi descrizione sotto.
AOutput (ARRAY[0..1] OF REAL) Impostazione valore analogico in uscita (%). Verificare parametri inverter P06.14 e P06.15.
Done (BOOL) Esecuzione terminata, rimane attivo fino alla disabilitazione di Enable.
Fault (BOOL) Attiva per un loop di programma se errore esecuzione.
DReady (BOOL) Attivo se comunicazione attiva con driver.
DFault (BOOL) Attivo se inverter in fault (Registro inverter 2100=4).
FwRun (BOOL) Attivo se motore in rotazione avanti.
BkRun (BOOL) Attivo se motore in rotazione indietro.
OFrequency (REAL) Frequenza in uscita (Hz).
BUSVoltage (REAL) Tensione BUS in continua (V).
OCurrent (REAL) Corrente erogata al motore (A).
OVoltage (REAL) Tensione in uscita (V).
MSpeed (REAL) Velocità rotazione motore (RPM).
OPower (REAL) Percentuale di potenza erogata (%).
AInput (ARRAY[0..3] OF REAL) Valore analogico in ingresso (%), risoluzione 10mV.
FType (STRING[4]) Tipo di errore, consultare tabella Fault instruction sul manuale.
CommOk (UDINT) Numero di comunicazioni effetuate con driver.
Errors (UDINT) Numero errori di comunicazione con driver.
Utilizzo inverter con limite di coppia
Impostazione velocità con limite di coppia
In questa configurazione viene impostato il valore di velocità a cui il motore deve ruotare, fissando il limite di coppia erogabile dal motore. Raggiunto il valore impostato la coppia verrà mantenuta adeguando opportunamente la velocità di rotazione.
- Impostare controllo vettoriale (SVC), P00.00=1.
- Impostare comando frequenza B da Modbus, P00.06=8.
- Disabilitare controllo di coppia, si controlla solo il limite, P03.11=0.
- Impostare limite coppia da Modbus (Registro 16#2007, Il valore impostato non è visibile da tastierino), P03.18=5.
- Per visualizzare la frequenza impostata da Modbus (Registro 16#2001), P17.00.
- Per visualizzare frequenza in uscita attuale, P17.01.
- Per visualizzare coppia attuale erogata dal motore, P17.09.
Impostazione coppia con limite di velocità
In questa configurazione viene impostato il valore di coppia che il motore deve erogare, fissando il limite di velocità di rotazione Orarria/Antioraria. Il motore ruoterà alla velocità necessaria ad erogare la copia impostata. Se non vi è sufficente coppia resistiva si raggiungerà il limite di velocità definito.
- Impostare controllo vettoriale (SVC), P00.00=1.
- Abilitare impostazione coppia da Modbus (Registro 16#2004), P03.11=7.
- Impostare limite di frequenza direzione oraria da Modbus (Registro 16#2005 Il valore impostato non è visibile da tastierino), P03.14=6.
- Impostare limite di frequenza direzione antioraria da Modbus (Registro 16#2006 Il valore impostato non è visibile da tastierino), P03.15=6.
- Per visualizzare frequenza in uscita attuale, P17.01.
- Per visualizzare la coppia impostata da Modbus (Registro 16#2004), P17.15.
Esempi
Come utilizzare gli esempi.
Sono gestiti 2 inverter INVT GD20EU connessi in Modbus. Come si vede dal programma in FBD i vari FB sono eseguiti in cascata, in questo modo terminata l’esecuzione del primo, viene eseguito il successivo e così di seguito fino all’ultimo che disabilita il primo facendo ripartire la sequenza.
LogicLab (Ptp141, FBD_InvtGD20EU)
PROGRAM FBD_InvtGD20EU
VAR
Sp : SysSerialPort; (* Serial port management *)
MMDB : ModbusMaster_v3; (* Modbus master *)
Driver1 : InvtGD20EU_v4; (* Inverter manager *)
Driver2 : InvtGD20EU_v4; (* Inverter manager *)
END_VAR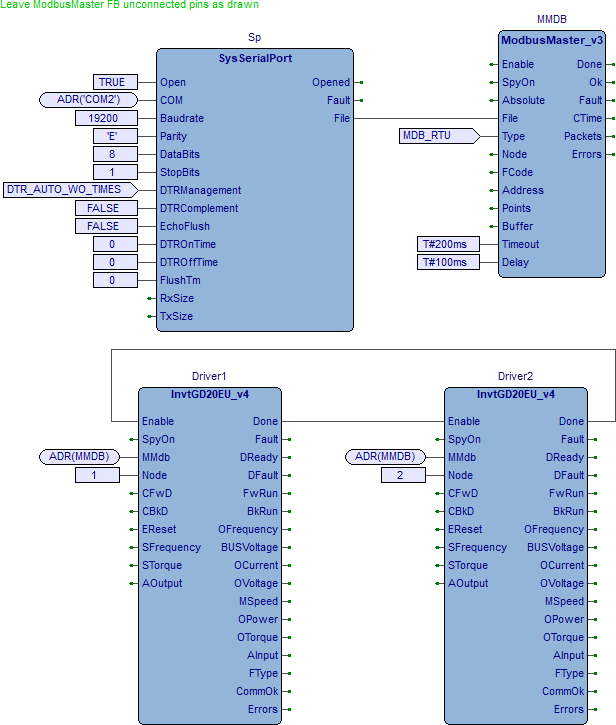
LogicLab (Ptp141, ST_InvtGD20EU)
PROGRAM ST_InvtGD20EU
VAR
i : UDINT; (* Auxiliary variable *)
Sp : SysSerialPort; (* Serial port management *)
MMdb : ModbusMaster_v3; (* Modbus master *)
Driver1 : InvtGD20EU_v4; (* Inverter manager *)
Driver2 : InvtGD20EU_v4; (* Inverter manager *)
END_VAR
// *****************************************************************************
// PROGRAM "ST_InvtGD20EU"
// *****************************************************************************
// This program.shows the "InvtGD20EU" FB use.
// -----------------------------------------------------------------------------
// -------------------------------------------------------------------------
// INITIALIZATION
// -------------------------------------------------------------------------
// Program initializations.
IF (SysFirstLoop) THEN
// Serial port settings.
Sp.COM:=ADR('COM2'); //COM port definition
Sp.Baudrate:=19200; //Baudrate
Sp.Parity:='E'; //Parity
Sp.DataBits:=8; //Data bits
Sp.StopBits:=1; //Stop bits
Sp.DTRManagement:=DTR_AUTO_WO_TIMES; //DTR management
Sp.DTRComplement:=FALSE; //DTR complement
Sp.EchoFlush:=FALSE; //Received echo flush
Sp.DTROnTime:=0; //DTR On time delay (mS)
Sp.DTROffTime:=0; //DTR Off time delay (mS)
Sp.FlushTm:=0; //Flush time (mS)
Sp.RxSize:=0; //Rx buffer size
Sp.TxSize:=0; //Tx buffer size
// Modbus master settings.
MMdb.Type:=MODBUS_PROTOCOL#MDB_RTU; //Modbus protocol type
MMdb.Timeout:=T#1s; //Timeout time
MMdb.Delay:=T#100ms; //Delay time
Driver1.Node:=1; //Inverter node
Driver1.MMdb:=ADR(MMdb); //ModbusMaster pointer
Driver2.Node:=2; //Inverter node
Driver2.MMdb:=ADR(MMdb); //ModbusMaster pointer
END_IF;
// -------------------------------------------------------------------------
// DRIVER MANAGEMENT
// -------------------------------------------------------------------------
// Manage the Modbus communication.
Sp(Open:=TRUE); //Serial port management
MMdb.File:=Sp.File; //File pointer
MMdb(); //Modbus master
// Manages the drivers.
Driver1(Enable:=NOT(Driver2.Done)); //Inverter
Driver2(Enable:=(Driver1.Done)); //Inverter
// [End of file]Accesso diretto ai parametri via Modbus
Oltre ai parametri gestiti direttamente dal blocco funzione InvtGD20EU, è possibile da Modbus accedere a tutti i parametri dell’inverter. L’indirizzo del parametro occupa 2 byte, il byte alto è il numero di gruppo prima del punto, il byte basso è il numero dopo il punto. Sia il byte alto che il byte basso devono essere convertiti in esadecimale. Ad esempio per il parametro P05.05, l’indirizzo è 16#0505, per il parametro P10.01 l’indirizzo è 16#0A01. Sono possibili solo i comandi Modbus
- 16#03 Read holding registers, per la lettura del valore del parametro.
- 16#10 Preset multiple registers, per la scrittura del valore del parametro (Solo nei parametri in cui è consentita la scrittura).
Quindi è possibile abbinare al FB InvtGD20EU anche il FB ACModbus per agire a su tutti i parametri dell’inverter. Ecco il programma INVTGD20RWPars che abbina i due FBs per:
- Acquisire P07.12: Converter module temperature
- Impostare P08.39: Cooling fan running mode
LogicLab (Ptp141, INVTGD20RWPars)
PROGRAM INVTGD20RWPars
VAR
RValue : UINT; (* Modbus read values *)
WValue : UINT; (* Modbus read values *)
Sp : SysSerialPort; (* Serial port management *)
MMdb : ModbusMaster_v3; (* Modbus master *)
ACMdb : ACModbus_v3; (* Array command modbus *)
Driver : InvtGD20EU_v4; (* Inverter manager *)
ACData : ARRAY[0..1] OF ACMODBUS_DATA_V3; (* Array command data *)
END_VAR
// *****************************************************************************
// PROGRAM "INVTGD20RWPars"
// *****************************************************************************
// This program shows how to directly access to inverter parameters.
// -----------------------------------------------------------------------------
// -------------------------------------------------------------------------
// INITIALIZATION
// -------------------------------------------------------------------------
// Program initializations.
IF (SysFirstLoop) THEN
// Serial port settings.
Sp.COM:=ADR('COM0'); //COM port definition
Sp.Baudrate:=19200; //Baudrate
Sp.Parity:='E'; //Parity
Sp.DataBits:=8; //Data bits
Sp.StopBits:=1; //Stop bits
Sp.DTRManagement:=DTR_AUTO_WO_TIMES; //DTR management
Sp.DTRComplement:=FALSE; //DTR complement
Sp.EchoFlush:=FALSE; //Received echo flush
Sp.DTROnTime:=0; //DTR On time delay (mS)
Sp.DTROffTime:=0; //DTR Off time delay (mS)
Sp.FlushTm:=0; //Flush time (mS)
Sp.RxSize:=0; //Rx buffer size
Sp.TxSize:=0; //Tx buffer size
// Modbus master settings.
MMdb.Type:=MODBUS_PROTOCOL#MDB_RTU; //Modbus protocol type
MMdb.Timeout:=T#1s; //Timeout time
MMdb.Delay:=T#100ms; //Delay time
Driver.Node:=1; //Inverter node
Driver.MMdb:=ADR(MMdb); //ModbusMaster pointer
// Array command modbus settings.
ACMdb.MMdb:=ADR(MMdb); //ModbusMaster pointer
ACMdb.ACAdd:=ADR(ACData); //Array command address
ACMdb.ACNr:=SIZEOF(ACData)/SIZEOF(ACData[0]); //Array command number
ACMdb.RTime:=T#10s; //Retry time
// Array command parameters settings.
ACData[0].Command.0:=TRUE; //Spy On
ACData[0].Command.1:=TRUE; //Absolute addressing
ACData[0].Node:=1; //Modbus node
ACData[0].FCode:=16#03; //Modbus function code
ACData[0].Address:=16#070B; //Parameter P07.11
ACData[0].Points:=1; //Modbus register points
ACData[0].Buffer:=ADR(RValue); //Memory buffer address
ACData[1].Command.0:=TRUE; //Spy On
ACData[1].Command.1:=TRUE; //Absolute addressing
ACData[1].Node:=1; //Modbus node
ACData[1].FCode:=16#10; //Modbus function code
ACData[1].Address:=16#0827; //Parameter P08.39
ACData[1].Points:=1; //Modbus register points
ACData[1].Buffer:=ADR(WValue); //Memory buffer address
END_IF;
// -------------------------------------------------------------------------
// DRIVER MANAGEMENT
// -------------------------------------------------------------------------
// Manage the Modbus communication.
Sp(Open:=TRUE); //Serial port management
MMdb.File:=Sp.File; //File pointer
MMdb(); //Modbus master
// Manages the drivers.
Driver(Enable:=NOT(ACMdb.Done)); //Inverter
ACMdb(Enable:=Driver.Done); //FB enable
// [End of file]