Sergio Bertana
Risposte nei forum create
-
AutorePost
-
Sergio Bertana
Amministratore del forumL’esempio del post precedente al tuo fà già esattamente quello che hai chiesto.
Per poter visulizzare variabili sul pannello HMI devi dichiarare la variabili globale mappandola nella DB100 all’indirizzo che preferisci.
Ricorda che le variabili a 2 bytes INT, UINT, WORD devono sempre essere allocate ad indirizzi divisibili per 2 (Esempio DB100.2, DB100.8, DB100.100, ecc…).
Le variabili a 4 bytes DINT, UDINT, DWORD devono sempre essere allocate ad indirizzi divisibili per 4 (Esempio DB100.4, DB100.8, DB100.256, ecc…).
Sul terminale HMI devi indirizzare la variabile usando l’indirizzo di allocazione diviso per 2 sommato a 40000. Se ad esempio la variabile è allocata a DB100.256 sul terminale dovrai indicare indirizzo 40128.
Guarda questo topic dove trovi un esempio di progetto PLC e HMI.
Amministratore del forumLe pagine webVisu non si possono visualizzare sui pannelli HMI, eventualmente è possibile utilizzare la serie cMT-iPC per la sola visualizzazione.
In alternativa puoi evitare di utilizzare WebVisu ed utilizzare un HMI che si interfaccia a CODESYS al PLC. Naturalmente in questo caso devi rifare l’interfaccia grafica ma considerando che WebVisu non ha potenzialità enormi, il rifarla utilizzando EasyBuilderPro non dovrebbe essere molto difficoltoso.
Dipende da quante applicazioni hai, certo sulla prima applicazione dovrai investire piu tempo per rifare l’interfaccia ma poi lo risparmi sul costo globale, puoi utilizzare anche la piu economica serie iP.
Naturalmente se ti serve utilizzare EasyAccess per la teleassistenza via Internet devi passare alla serie iE o superiore.
Ti ricordo anche che con la serie cMT puoi avere anche il PLC in CODESYS integrato nel pannello.
Amministratore del forumCome ho scritto nelle risposte all’inzio del topic, gli I/O logici sono automaticamente mappati nell’immagine di processo, il FB SysGetAnInp serve per l’acquisizione degli ingressi analogici.
Ecco lo screenshot del programma SimplyLD, un semplice programma ladder che realizza una gestione logica ed una acquisizione analogica.
Come vedi gli I/O logici li ho dichiarati nelle variabili globali, quindi sono visibili da tutti i programmi che possono referenziarli.
Nel programma ladder ho istanziato il FB SysGetAnInp per l’acquisizione analogica e poi ho creato un nuovo ramo ladder, che ha un contatto ed una uscita. Ho trascinato sul contatto l’istanza creata e poi ho cancellato sia il contatto che l’uscita.
Per definire le variabili in ingresso/uscita dal FB basta trascinare l’oggetto sul relativo piedino. Ti lascio il progetto per il download.
Amministratore del forumL’esempio che ho pubblicato nel manuale on-line della FTPClient l’ho testato proprio con un FileZilla server, come vedi dal report di spionaggio.
Il tuo programma lo fai eseguire nella task di Back…
Cosa vedi nella console di spionaggio…
Se esegui da telnet il comando SysLog che errori ti riporta…
Quale è la versione del sistema operativo dello SlimLine…Amministratore del forumIntanto direi di scaricare l’ultima versione della libreria eLLabNetworkLib e di utilizzare l’esempio riportato in questo articolo.
Però se non riesce a connettersi al server verificherei se un altro client FTP da un’altro PC della rete può connettersi al server FileZilla. Tanto per essere sicuri che la connessione al server sia possibile e non bloccata da qualche controllo di sicurezza.
Inoltre verfica tramite una connessione Telnet allo SlimLine eseguendo il comando Ping sull’IP del server FTP se il comando và a buon fine cioè se il server è raggiungibile dallo SlimLine.
Aprile 15, 2020 alle 1:03 pm in risposta a: Passaggio dati in POST in formato JSON verso server HTTP #54664Amministratore del forumUna cosa che mi è sfuggita sin dall’inizio, ma il programma lo stai eseguendo nella task di Back. Perchè VA ESEGUITO solo in task Back.Amministratore del forumIl FB è stato completamente riscritto ed ora non ha più il limite sui caratteri, se vedi l’esempio ST_SendFileByEMail viene inviato un body da 2048 bytes, ma può anche essere più grande.
Il manuale in PDF ci costringeva a realizzare una nuova versione ad ogni modifica, inoltre non era possibile gestire la traduzione automatica. Con il manuale On-Line ogni modifica è immediatamente disponibile e possiamo automaticamente pubblicarla in molte lingue grazie ad un traduttore automatico inserito nel nostro sito di supporto.
Amministratore del forumLa nuova versione di LogicLab ha introdotto ulteriori controlli sulla corrispondenza dei tipi di dato, in linea generale quel tipo di warning stà ad indicare che viene eseguita una somma tra un pointer ed una variabile.
Le warning non inficiano il funzionamento del programma, ma se vuoi evitare la warning ti consiglio di eseguire il download dell’ultima versione della libreria eLLabNetworkLib ed utilizzare il nuovo FB EMailSend.
Aprile 2, 2020 alle 7:53 pm in risposta a: Passaggio dati in POST in formato JSON verso server HTTP #54478Amministratore del forumAnche se non hai l’ultima versione (Puoi scaricare dal sito SFW184B130) la versione che hai tu supporta il DNS, quindi dovrebbe essere possibile il ping su un DNS come ad esempio Google.com.
In questo periodo siamo in quarantena e non posso fare ulteriori test, ti posso consigliare di eseguire l’upgrade del firmware (Vedi articolo), e poi vedere se il ping a Google.com funziona.
Poi anche per prova eseguire il programma di scambio dati utilizzando l’indirizzo IP al posto dell’URL, ecco di seguito la richiesta nslookup.
C:\TempData>nslookup www.slimline.altervista.org Risposta da un server non autorevole: Nome: slimline.altervista.org.cdn.cloudflare.net Addresses: 104.24.115.61 Aliases: www.slimline.altervista.org
Quindi nel programma sostituisci la riga
HTTPRq.HostAddress:=ADR(‘www.slimline.altervista.org’); //Server URL
Utilizzando l’indirizzo IP
HTTPRq.HostAddress:=ADR(‘104.24.115.61’); //Server URL
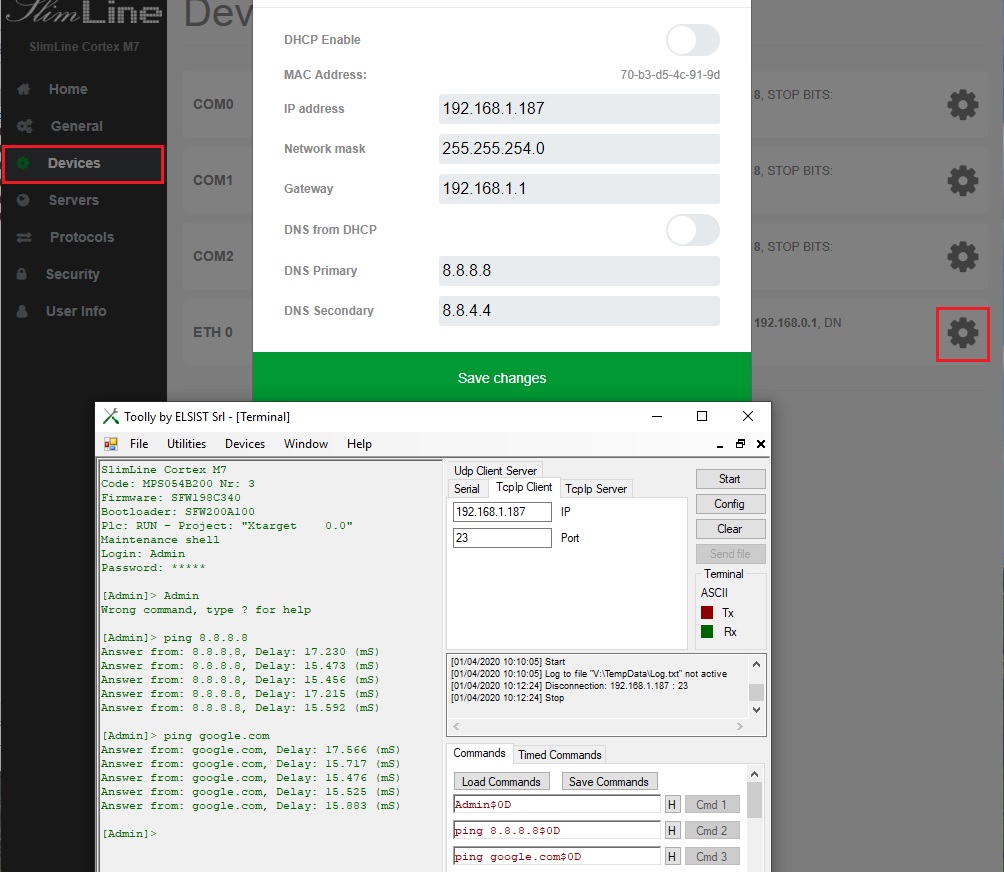
Amministratore del forumCome vedi da questo topic le 2 porte del terminale sono fisicamente separate tra di loro, e devono essere configurate su 2 classi diverse di rete.
Sono separate per garantire la separazione tra la rete di macchina, dove sono connessi i PLC e la rete aziendale che permette l’accesso del terminale ad Internet. In questo modo non è possibile dalla rete di macchina raggiungere la rete aziendale e viceversa.
Aprile 2, 2020 alle 9:12 am in risposta a: Passaggio dati in POST in formato JSON verso server HTTP #54472Amministratore del forumStrano che non funzioni il ping su DNS, mi puoi indicare la versione di firmware installata. La puoi vedere collegandoti in Telnet.
Aprile 1, 2020 alle 8:14 am in risposta a: Passaggio dati in POST in formato JSON verso server HTTP #54419Amministratore del forumNon ti ho chiesto le cose essenziali:
Il programma che usi è esattamente un copia incolla dell’esempio…
Sullo SlimLine hai configurato correttamente il networking, hai impostato il gateway ed il server DNS…
Hai verificato che lo SlimLine possa andare correttamente in Internet… Per fare questo connettiti il Telnet ed esegui un comando di ping. Prima Ping 8.8.8.8 per verificare che il sistema possa accedere ad Internet e poi Ping google.com per verificare che sia raggiungibile il DNS server (Screenshot).
Amministratore del forumIl problema che lamenti sembrerebbe dovuto allo scaricamento della batteria tampone del real time clock. Il dispositivo adotta al suo interno un circuito di real time clock fornito all-in-one con la sua batteria, batteria che a specifica del fornitore ha una durata di 10 anni.
Può essere che nel tuo caso ci sia stato un degradamento precoce di questa batteria che adesso provoca il problema che lamenti.
Una verifica possibile per avallare questo problema, è connettersi in telnet e con il comando SysLog visualizzare i log di erore (I log sono visibili anche nel file Logs.txt nella cartella System, basta connettersi in FTP e scaricarlo). Se il problema è la batteria troverai un log del tipo:
“RTC Clock Halt bit is set” o “RTC Oscillator Stop Flag is set”
La soluzione è quella di ritornarci il prodotto per la riparazione, ti ricordo comunque che se il sistema è connesso ad Internet puoi utilizzare il FB SNTPRequest, sends a SNTP request per sincronizzarti con un orologio su Internet.
Amministratore del forumIl modulo CPU MPS053 che hai tu gestisce solo ingressi 0-10 volt in modo comune, discorso diverso se avessi a disposizione un modulo di acquisizione analogica, questo modulo dispone di un convertitore A/D con molte possibilità di acquisizione.
Intanto gestisce l’acquisizione in differenziale che permette di limitare i disturbi di crosstalk sul segnale acquisito, e nella configurazione con 1 Volt di fondo scala può acquisire con una risoluzione di 1.577uV. Mentre il modulo CPU ha una risoluzione di 9.7mV (Più di 6000 volte inferiore).
Amministratore del forumPremesso che la IEC-61131 ci ha dato 5 linguaggi per permetterci di utilizzare quello più adatto ad ogni necessità di programmazione, e che per operare con operazioni stringa come ad esempio nel tuo caso sia da preferire di gran lunga il linguaggio ST, questo non toglie che si possa utilizzare anche l’FBD. Ecco come la riga ST:
SysVarsnprintf(ADR(Str), SIZEOF(Str), ‘Value:%3.1f’, REAL_TYPE, ADR(Var));
Diventa in FBD (Screenshot).
-
AutorePost
{kind=link}
{kind=link}